无人机特技飞行曾是人类飞手的专属领域,而现在,一台普通四旋翼无人机连穿6道窄门,人类顶尖飞手成功率只有12.5%,而一套创新算法系统却豪取100%完美通关!
这项颠覆性研究来自浙江大学控制科学与工程学院高飞教授团队,他们放出"算法增强"大招,彻底打破"硬件决定天花板"的传统认知。
高飞团队通过智能算法实现了无人机自主特技飞行,突破了传统依赖硬件性能的局限,主要技术包括:
一“积木式”动作生成系统:用户只需标注关键位置和姿态(如“在此处倒飞”),系统即可自动生成连贯的特技轨迹,支持复杂动作的自由组合。
二偏航补偿算法:解决了倒飞、空翻等极限动作中的失控自转问题,确保飞行稳定性。
三意图修正功能:即使输入不合理(如动作间距过窄),系统仍能自动调整至安全状态,提高任务鲁棒性。

有网友直呼:"这简直是无人机界的'降维打击'!用智能算法弥补硬件短板,突破了传统飞行极限!"
这项名为《Unlocking aerobatic potential of quadcopters: Autonomous freestyle flight generation and execution》的研究成果,于近日正式发表在机器人领域国际顶级期刊《Science Robotics》上。

▍惊艳全场的三大实验:算法智能如何击败人类极限?
这支研究团队不仅提出了创新理论,还用三组极限测试验证了系统性能,结果令人震撼:
1. 非结构化超大场景特技飞行
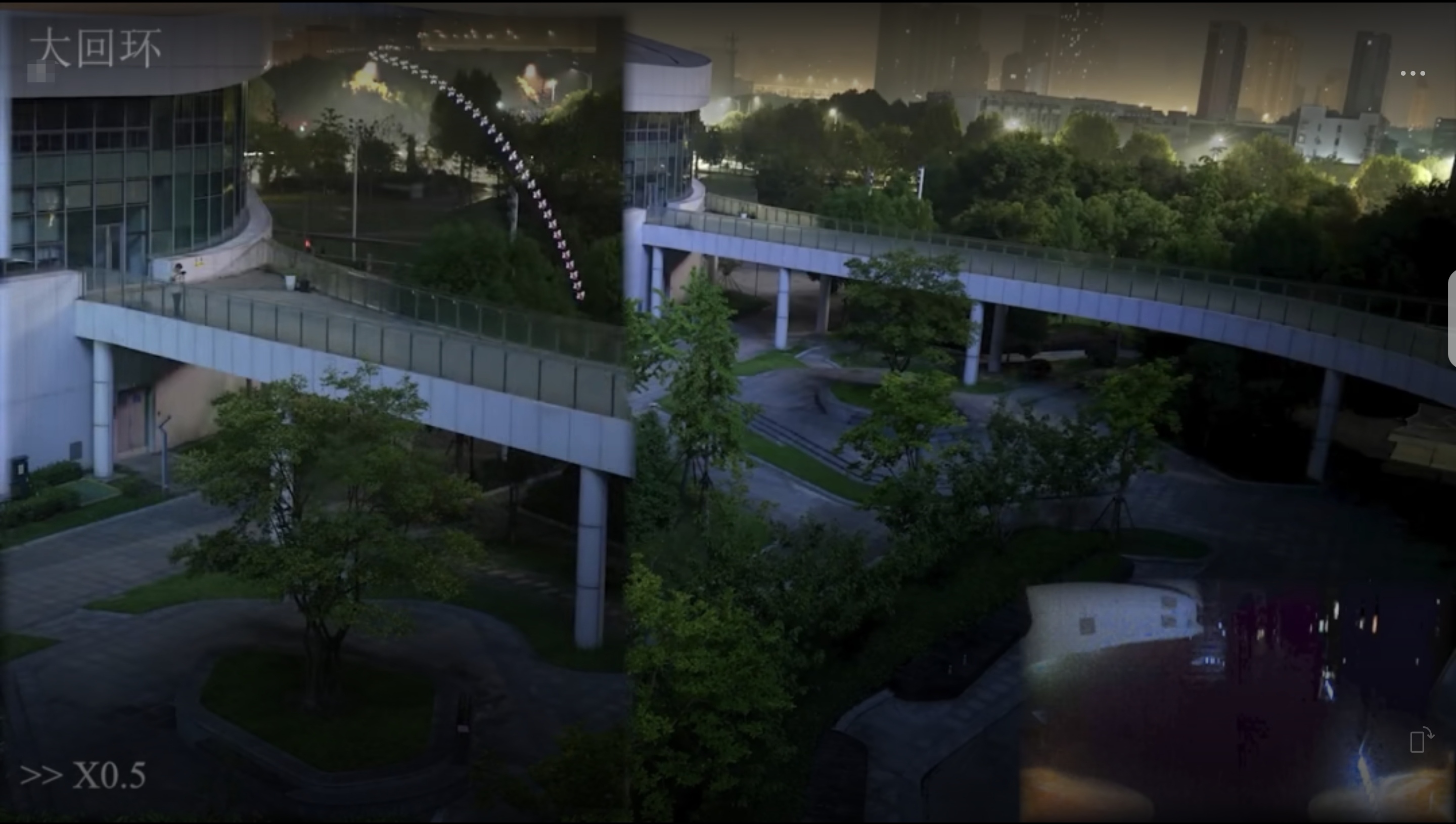
第一个挑战是在非结构化的超大室外环境中实现特技飞行——这对普通无人机来说几乎是不可能的任务。
让人惊叹的是,团队的系统在不依赖外部定位的情况下,实现了220米的自主飞行,连续完成了三个经典特技动作!
更夸张的是,研究团队特意将无人机动力限制在普通商用水平(1.5g净推力和4弧度每秒角速度),系统依然展现出专业竞速机的特技表现。
这一结果直接证明:智能算法能够突破物理硬件性能的天花板!
2. 密集障碍环境下的高难度挑战

第二组测试更具挑战性——在仅3.5米高的狭窄障碍空间里,无人机要完成一系列高难度动作。
结果,空中机器人展现了媲美蜂鸟的灵巧性:倒飞穿过直径80厘米的圆环、在隧洞中连续蛇形机动。
系统还拥有独创的"意图修正"功能,即使输入特技意图不合理(如多个特技意图间距过窄),系统仍能自动调整到安全合理位置。
在多次重复测试中,空中机器人以最高7米/秒的速度穿越障碍时,仍保持15厘米内的跟踪精度!这种精确度在机器人领域简直是教科书级别的突破。
在多次重复测试中,空中机器人以最高7米/秒的速度穿越障碍时,仍保持15厘米内的跟踪精度!这种精确度在机器人领域简直是教科书级别的突破。
3. 人机特技对抗:算法完胜人类飞手

最具看点的是第三组实验——与国内穿越机顶尖飞手的同台竞技。
结果简直是碾压式胜利:
·在连续穿越6道1.2米窄门的测试中,人类飞手24次尝试仅成功3次,成功率惨淡的12.5%
·而系统5次飞行全部成功,完美的100%成功率!
·在定性对比中,专业飞手需要更多安全空间才能恢复稳态,而系统可以在小几倍区域内完成同样动作。即使选择飞手最佳飞行效果对比,其轨迹也不如空中机器人流畅。
这一结果无可争辩地证明:系统在生成和执行复杂特技动作的能力,已达到人类难以企及的水平!
▍超越炫技:从火山监测到深空探测的无限应用
浙大团队的这项突破并非只为了打造酷炫的飞行表演,而是为了解决实际问题。研究为空中机器人在极端复杂环境下的任务执行提供了全新可能:
火山监测革命:通过动态姿态调整与轨迹优化,空中机器人有望实现喷发口边缘的探针抛投部署,为科学家提供前所未有的一手数据。
灾害救援突破:结合特技飞行的高速穿梭能力,无人机可能实现对坍塌建筑内狭窄缝隙的快速探测,大幅提升救援效率和生命挽救机会。
太空探测应用:研究提出的动态轨迹规划方法可为航天器在太空陨石密集区的安全机动提供理论参考,通过多自由度姿态控制降低极端机动对载人设备的过载冲击。
受限空间中的连续特技动作
这种"运动智能补偿硬件短板"的研究思路,为挑战机器人性能极限的科研人员提供了全新思考角度。例如,在传感器视场受限场景中,通过主动设计包含翻滚等复合动作的轨迹,可最大化数据采集质量,从根本上改变环境感知方式。
它证明,即使在硬件受限情况下,通过算法优化同样能显著提升系统能力。
▍结语与展望
浙大团队的这项研究将带来的不仅是学术价值,更是实际应用的革新。当我们面对硬件成本高、资源有限的现实挑战时,优化算法或是一条更加经济高效的突破路径。特别是在危险环境下,这种能在极限条件依然保持稳定飞行的无人机系统,将为人类提供有效的安全保障。
团队表示未来将进一步探索能处理未知和动态环境的方法,通过构建"感知-决策-执行"闭环系统,真正实现类生物特技飞行的全自主化作业能力。
可以拭目以待,当"算法增强"的魔力遇上中国速度,无人机技术的下一个十年会迸发出怎样的火花。
文章来源:Ally 机器人大讲堂
论文地址:
https://www.science.org/doi/10.1126/scirobotics.adp9905








